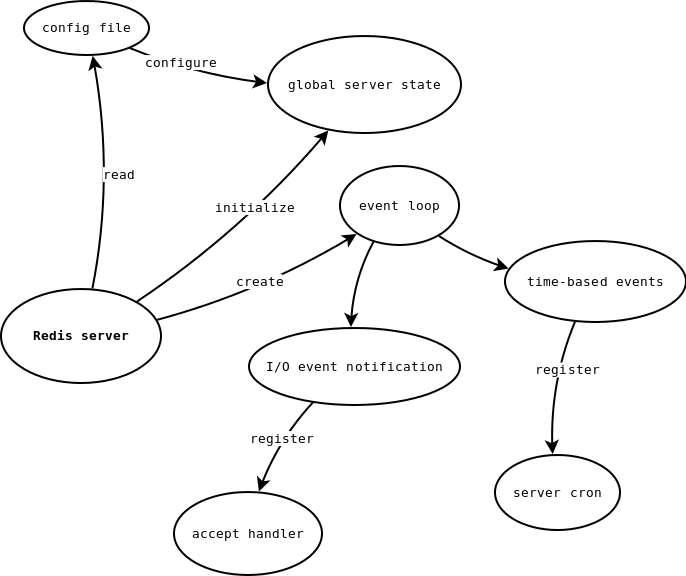
让我们从 redis.c -> main() 开始
读取配置文件
在初始化完毕一些系统时间之后,redis开始初始化服务器配置。
initServerConfig
在这个函数中,初始化全局变量
struct redisServer server; /* server global state */
struct redisServer 结构体描述了服务器的状态。这种庞大的数据结构实在是看的烦躁。
这里可以很方便的看到redis的系统默认配置。另外还初始化了系统命令表。
server.commands = dictCreate(&commandTableDictType,NULL);
populateCommandTable();
这里我们可以找到redis的命令所对应的函数名称。
struct redisCommand redisCommandTable[] = {
{"get",getCommand,2,"r",0,NULL,1,1,1,0,0},
{"set",setCommand,3,"wm",0,noPreloadGetKeys,1,1,1,0,0},
{"setnx",setnxCommand,3,"wm",0,noPreloadGetKeys,1,1,1,0,0},
{"setex",setexCommand,4,"wm",0,noPreloadGetKeys,1,1,1,0,0},
{"psetex",psetexCommand,4,"wm",0,noPreloadGetKeys,1,1,1,0,0},
{"append",appendCommand,3,"wm",0,NULL,1,1,1,0,0},
//...
}
struct redisCommand {
// 命令的名字
char *name;
// 命令的实现函数
redisCommandProc *proc;
// 命令所需的参数数量
int arity;
// 字符形式表示的 FLAG 值
char *sflags; /* Flags as string represenation, one char per flag. */
// 实际的 FLAG 值,由 sflags 计算得出
int flags; /* The actual flags, obtained from the 'sflags' field. */
/* Use a function to determine keys arguments in a command line.
* Used for Redis Cluster redirect. */
// 可选,在以下三个参数不足以决定命令的 key 参数时使用
redisGetKeysProc *getkeys_proc;
/* What keys should be loaded in background when calling this command? */
// 第一个 key 的位置
int firstkey; /* The first argument that's a key (0 = no keys) */
// 第二个 key 的位置
int lastkey; /* THe last argument that's a key */
// 两个 key 之间的空隔
int keystep; /* The step between first and last key */
// 这个命令被执行所耗费的总毫秒数
long long microseconds;
// 这个命令被调用的总次数
long long calls;
};
这里可以看出,redis的命令配置,保存在底层数据结构dic中。
服务器初始化
initServer
这里设置信号回调函数,和继续初始化
struct redisServer server; /* server global state */
结构外,创建了SharedObjects。
createSharedObjects
initServer->createSharedObjects
redis这里将除了把一些常用的字符串保存起来,目的就是为了减少不断申请释放时CPU时间,内存碎片等等,常用的返回客户端的命令,消息等。如
shared.ok = createObject(REDIS_STRING,sdsnew("+OK\r\n"));
shared.err = createObject(REDIS_STRING,sdsnew("-ERR\r\n"));
//...
shared.wrongtypeerr = createObject(REDIS_STRING,sdsnew(
"-WRONGTYPE Operation against a key holding the wrong kind of value\r\n"));
//...
还初始化了一个很大的共享数字对象。
#define REDIS_SHARED_INTEGERS 10000
for (j = 0; j < REDIS_SHARED_INTEGERS; j++) {
shared.integers[j] = createObject(REDIS_STRING,(void*)(long)j);
shared.integers[j]->encoding = REDIS_ENCODING_INT;
}
aeCreateEventLoop
initServer->aeCreateEventLoop
/* Include the best multiplexing layer supported by this system.
* The following should be ordered by performances, descending. */
#ifdef HAVE_EVPORT
#include "ae_evport.c"
#else
#ifdef HAVE_EPOLL
#include "ae_epoll.c"
#else
#ifdef HAVE_KQUEUE
#include "ae_kqueue.c"
#else
#include "ae_select.c"
#endif
#endif
#endif
接下来创建eventloop。这里调用 aeApiCreate 创建event loop。redis这里根据不同平台会选择不同的event方式,
Linux 使用epoll,BSD上面使用kqueue,其他选择select
初始化网络连接
if (server.port != 0) {
server.ipfd = anetTcpServer(server.neterr,server.port,server.bindaddr);
if (server.ipfd == ANET_ERR) {
redisLog(REDIS_WARNING, "Opening port %d: %s",
server.port, server.neterr);
exit(1);
}
}
if (server.unixsocket != NULL) {
unlink(server.unixsocket); /* don't care if this fails */
server.sofd = anetUnixServer(server.neterr,server.unixsocket,server.unixsocketperm);
if (server.sofd == ANET_ERR) {
redisLog(REDIS_WARNING, "Opening socket: %s", server.neterr);
exit(1);
}
}
创建系统cron定时器
aeCreateTimeEvent(server.el, 1, serverCron, NULL, NULL);
aeCreateTimeEvent
aeCreateTimeEvent accepts the following as parameters:
eventLoop: This is server.el in redis.c
milliseconds: The number of milliseconds from the current time after which the timer expires.
proc: Function pointer. Stores the address of the function that has to be called after the timer expires.
clientData: Mostly NULL.
finalizerProc: Pointer to the function that has to be called before the timed event is removed from the list of timed events.
aeCreateTimeEvent 创建一个定时器,redis会在这个serverCron中清理系统变量,判断是否需要写入文件等操作。
在event loop中绑定回调函数
if (server.ipfd > 0 && aeCreateFileEvent(server.el,server.ipfd,AE_READABLE,
acceptTcpHandler,NULL) == AE_ERR) redisPanic("Unrecoverable error creating server.ipfd file event.");
设置启动event loop
// 设置事件执行前要运行的函数
aeSetBeforeSleepProc(server.el,beforeSleep);
// 启动服务器循环
aeMain(server.el);
// 关闭服务器,删除事件
aeDeleteEventLoop(server.el);
aeMain函数和之前用的很多的windows中的message queue非常相似。redis不断循环等待执行event。这里不论是定时器还是socket event,都会在这个event loop中被执行。
void aeMain(aeEventLoop *eventLoop) {
eventLoop->stop = 0;
while (!eventLoop->stop) {
// 如果有需要在事件处理前执行的函数,那么运行它
if (eventLoop->beforesleep != NULL)
eventLoop->beforesleep(eventLoop);
// 开始处理事件
aeProcessEvents(eventLoop, AE_ALL_EVENTS);
}
}
方便整理,这里重复一下一开始的流程图
处理客户端命令流程
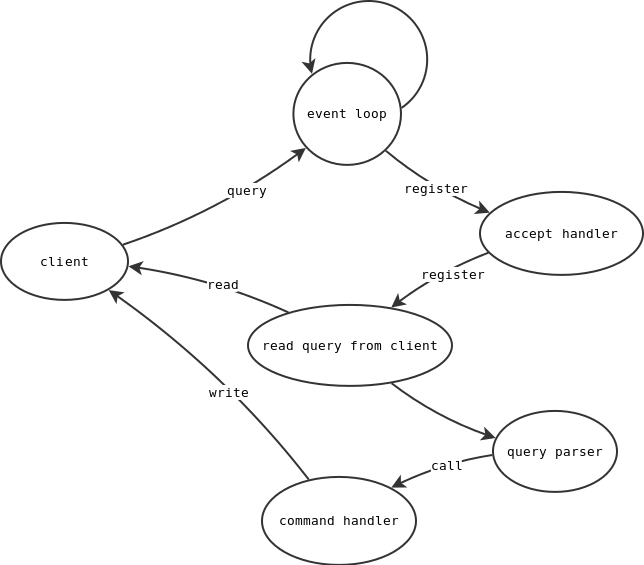
之前我们已经注册了socket acceptTcpHandler 回调函数,现在的流程是
acceptTcpHandler->acceptCommonHandler->createClient->aeCreateFileEvent
if (aeCreateFileEvent(server.el, c->fd, AE_READABLE,
readQueryFromClient, c) == AE_ERR) {
freeClient(c);
return NULL;
}
这里又向event loop中加入一个新的事件callback函数:aeCreateFileEvent 用于把event loop中的监听的事件和回调函数绑定在一起。
readQueryFromClient 则是客户端一切命令的入口函数。
void readQueryFromClient(aeEventLoop *el, int fd, void *privdata, int mask) {
redisClient *c = (redisClient*) privdata;
char buf[REDIS_IOBUF_LEN];
int nread;
// ...
nread = read(fd, buf, REDIS_IOBUF_LEN);
// ...
if (nread) {
size_t oldlen = sdslen(c->querybuf);
c->querybuf = sdscatlen(c->querybuf, buf, nread);
c->lastinteraction = time(NULL);
/* Scan this new piece of the query for the newline. We do this
* here in order to make sure we perform this scan just one time
* per piece of buffer, leading to an O(N) scan instead of O(N*N) */
if (c->bulklen == -1 && c->newline == NULL)
c->newline = strchr(c->querybuf+oldlen,'\n');
} else {
return;
}
Processinputbuffer(c);
}
readQueryFromClient读取客户端命令,交给Processinputbuffer处理。
void processInputBuffer(redisClient *c) {
//...
if (processCommand(c) == REDIS_OK)
resetClient(c);
}
int processCommand(redisClient *c) {
//...
call(c,REDIS_CALL_FULL);
}
这里call回根据command定义的callback函数,执行相对应的redis命令代码。
当command执行完毕之后,准备将结果传递给客户端。这里可以看到注册了sendReplyToClient回调函数。
int prepareClientToWrite(redisClient *c) {
if (c->flags & REDIS_LUA_CLIENT) return REDIS_OK;
if (c->fd <= 0) return REDIS_ERR; /* Fake client */
if (c->bufpos == 0 && listLength(c->reply) == 0 &&
(c->replstate == REDIS_REPL_NONE || c->replstate == REDIS_REPL_ONLINE) &&
aeCreateFileEvent(server.el, c->fd, AE_WRITABLE, sendReplyToClient, c) == AE_ERR)
return REDIS_ERR;
return REDIS_OK;
}
读到这里,我们已经看到了。redis在处理event loop的时候,不仅仅是处理客户端的连接,很多redis内部的流程也是通过event loop实现的。这个是event driven常常遇到的方式。
内容资料、图片、代码参考



